About
Yen-Chen Lin
Research Scientist, Google DeepMind
Email: yenchenl [at] google (dot) com
Twitter /
Google Scholar /
Github
I am a research scientist at Google DeepMind. I am interested in generative AI.
Previously, I was a research scientist at Nvidia. I earned my Ph.D. from MIT, where I was advised by Phillip Isola and Alberto Rodriguez.
Selected Publications
For a full list of my publications, please see here.
Cosmos World Foundation Model Platform for Physical AI
Arxiv 2025 /
Video /
Paper /
Project Page /
Github /
HuggingFace
Press / BBC / Fortune / Wall Street Journal / Wired / New York Times / TechCrunch
Press / BBC / Fortune / Wall Street Journal / Wired / New York Times / TechCrunch
Generative models for data-driven simulation.
MIRA: Mental Imagery for Robotic Affordances
NeRF lets us synthesize novel orthographic views that work well with pixel-wise algorithms for robotic manipulation.
iNeRF: Inverting Neural Radiance Fields for Pose Estimation
Performing differentiable rendering with Neural Radiance Fields (NeRF) enables object pose estimation and camera tracking.
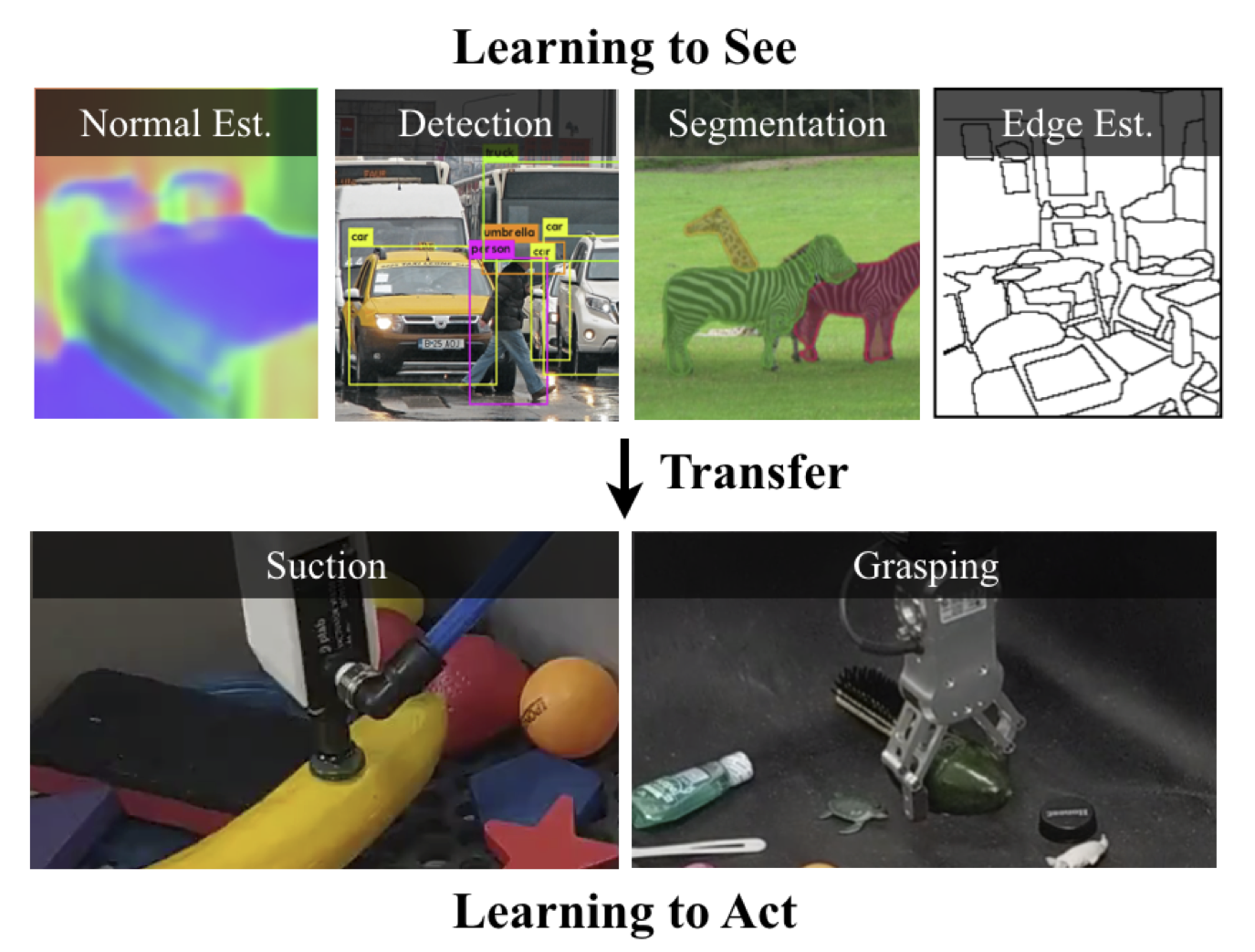
Learning to See before Learning to Act: Visual Pre-training for Manipulation
Transferring pre-trained vision models to perform grasping results in better sample efficiency and accuracy.
Experience-embedded Visual Foresight
Meta-learning the video prediction models allows the robot to adapt to new objects' visual dynamics.
Omnipush: accurate, diverse, real-world dataset of pushing dynamics with RGBD images
A dataset for meta-learning dynamic models.
It consists of 250 pushes for each of 250 objects, all recorded with RGB-D camera and a high precision tracking system.
Tactics for Adversarial Attack on Deep Reinforcement Learning Agents
Strategies for adversarial attacks on deep RL agents.
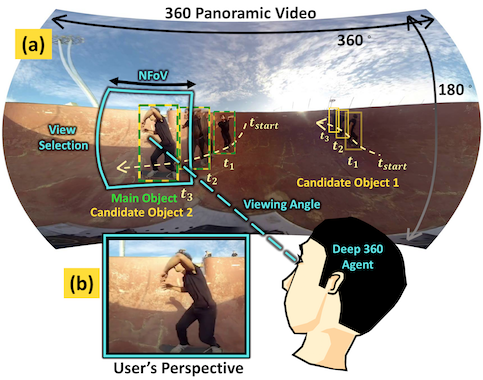
Deep 360 Pilot: Learning a Deep Agent for Piloting through 360° Sports Videos
CVPR 2017
Oral Presentation
An agent that learns to guide users where to look in 360° sports videos.
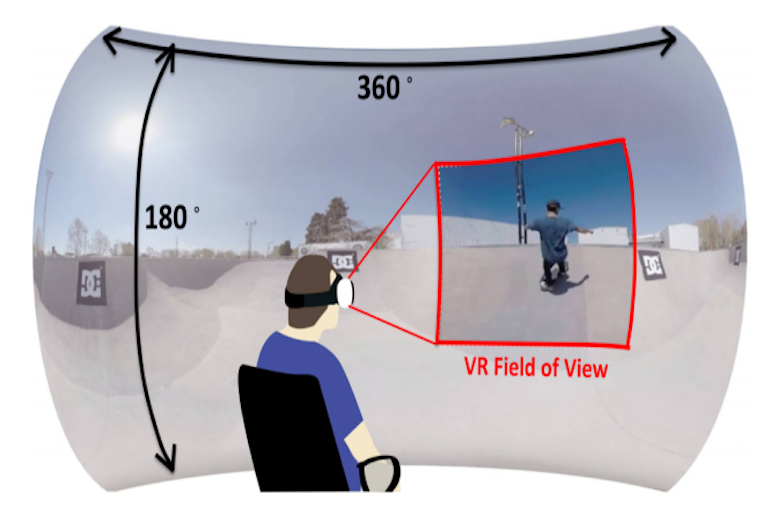
Tell Me Where to Look: Investigating Ways for Assisting Focus in 360° Video
CHI 2017
A study about how to assist users when watching 360° videos.